
I am a Mechanical Engineer and Roboticist, Completed Masters in Robotics Engineering at Worcester Polytechnic Institute (WPI).
I am passionate about planning path for robots avoiding obstacles and make decisions with collective information from the environment using Learning algorithms and Motion Planning methods.
My areas of interests include Perception, Motion planning, Computer-vision, Reinforcement learning and Control of autonomous robots.

Feb 2022 - Current
Location: MD, USA
Tools: ROS, C++, OpenCV Python, Ceres Solver, gstreamer, Jetson Xavier, Jetson Orin, Cameras
- RRAI works on Autonomous vehicles like Commercial buses and yard truks and further on Defense projects
- Developed Intrinsic Camera Calibration GUI and performed Camera quality test for the best camera properties
- Work on trailer angle detection and latency test for gstreamer pipeline
Tools: ROS, C++, CarMaker, Opendrive, RoadMapEditor, Open streetmap
- Developed Simulation Architecture, maps, converting RR proprietary simulation files format to Opensource format
- Created ROS interface for traffic sign, object and collision sensors in simulation environment

September 2021 - Feb 2022
Location: OH, USA
Tools: ROS, C++, Eigen Lib, Dijkstra, KD-Tree, Rviz
- Developed Route Planner stack for Autonomous vehicle, its simulations on Rviz and Performing tests on real vehicle
- Implemented Adaptive destination selection for reference planning and develop planning stack diagnosis system
- Tuning Lookahead distance for pure pursuit and Stanley Controller and test on Thordrive vehicle

July 2021 - Sept 2021
Location: CA, USA
Tools: Python, Raspberry pi, Pycoral TPU, Linux, Tensorflow
- Midea Group Emerging Technologies is a startup from Midea Group (Fortune Global 500 Company).
- They work on developing mobile robotic lawn mover and I have worked in Perception Team.
- Developing robot simulations, perception system with NN & train in embedded systems for mobile robotics application
- Design, implement navigation algorithms, setup experimental process & develop test scripts for robotics SLAM system
September 2020 - Dec 2020
Tools: MATLAB, Simulink, C++
- Worked with Prof. Xiangrui Zeng for creating a behaviour planner and extending on CARLA
- Implementing behaviour prediction engine with MPC controller and Integrating Sensor fusion modules to detect multi agents
- Determining cost functions to create constraints for decision making module in Lane changing task with MIOs
- Evaluating Motion Metrics for collision detection in Simulink using stateflow diagram and triggering decision to change lane.
September 2020 - May 2021
Tools: ROS, Gazebo, C++, Kalman filter, AMCL, Eigen, OpenCV
- Worked at Human-Inspired Robotics(HIRo) Lab with Prof. Zhi Li on Velocity Obstacles method ORCA (Optimal Reciprocal Collision Avoidance) algorithm
- Implementing state of the art method ORCA for social aware navigation of freight robot in hospital environment
- Modelling & Integrating human and obstacle tracking modules for Multi-Human and robot Collision avoidance detection.
- Integrating RVO2 libraries into ROS environment and tunning & testing ORCA hyperparameters for robust navigation
Jan 2019 - May 2019
Tools: MATLAB, C++, Openvibe, LSL, psychtoolbox, Chestnut PCB
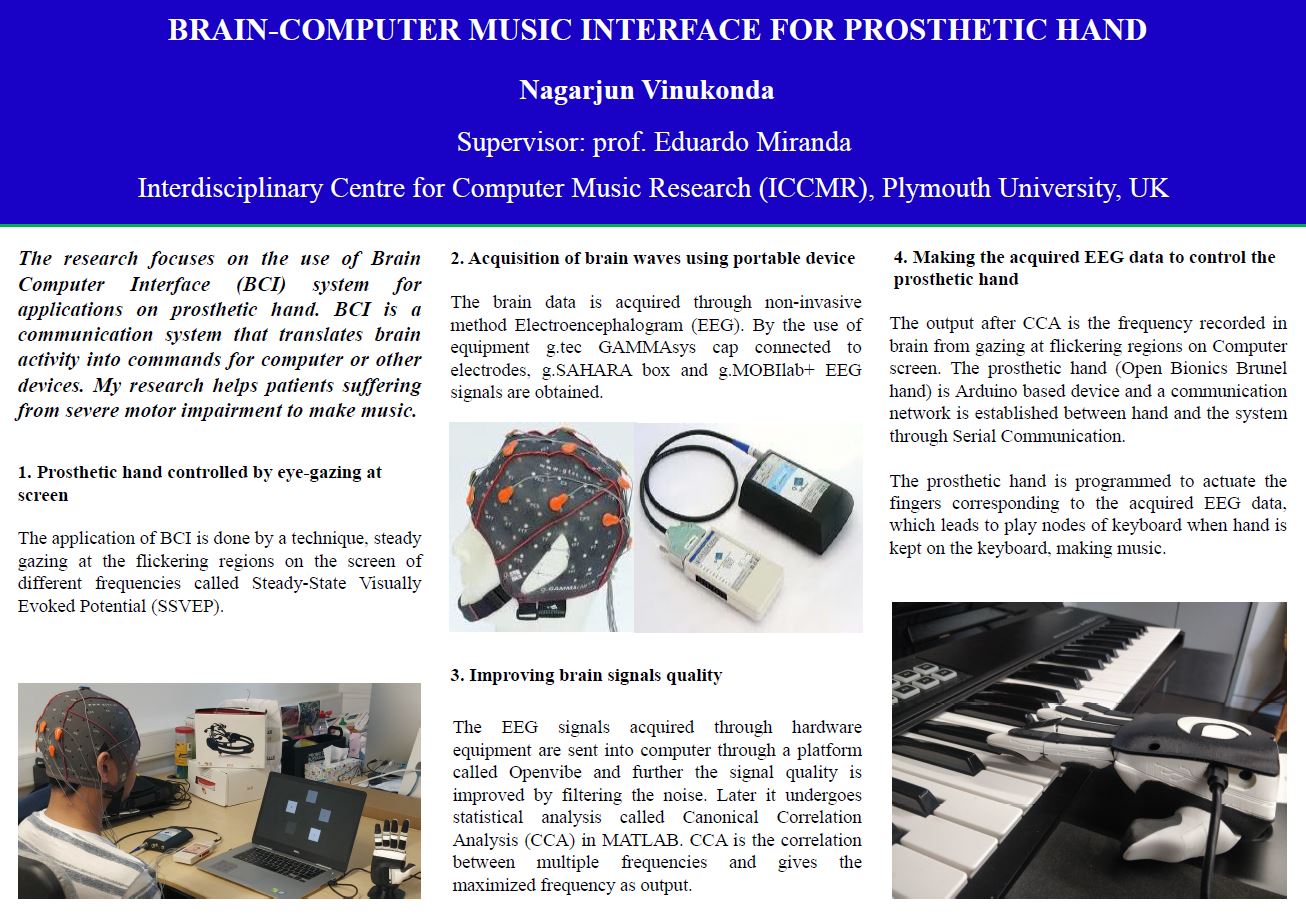
- I am advised by Prof.Eduardo Miranda to extend Research on Computer-Music with Robotics
- Developed a BCMI system that enables people with severe motor impairment to play music using prosthesis
- Programmed and modelled an integrated system that maps visual evoked potentials obtained to Brunel hand using MATLAB
- Analysed EEG signals in Openvibe and implemented noise filters using digital signal processing methods
- Researched and implemented Canonical Correlation Analysis algorithm to compute real-time mapping of EEG signals
{kind=link}
June 2020 - July 2020
Feb 2020 - May 2020
Tools: ROS, Python, OpenCV, Gazebo
- Implemented Autonomous, Semi-Autonomous functions for moving 7 DOF Baxter robot arms in ROS and designed gazebo environment
- Created ROS Nodes to build Meshed, Cone and Take Control Methods that works the Semi-autonomous function reducing human fatigue while teleoperation
- Programmed Aruco Marker detector for identifying cups in gazebo environment using OpenCV bridge
Sep 2019 - Dec 2019
Tools: ROS, Gazebo, PCL, C++, Python, Solid Works
- Implemented simulation environment of Lidar laser scan and published its data in Point cloud using ROS and Gazebo
- Investigated DMPs and assisted to train the DMPs generating trajectories for determined joint angles
- Implemented path planning approach algorithm for stair climbing and generating step trajectories
- Operated Motion capture lab to collect the gait data of 15 subjects using Vicon Nexus for generating joint angles
- Worked on LiDAR data acquisition, line segmentation of point cloud data using RANSAC and visualization of staircase using ROS
March 2020 - May 2020
June 2020 - July 2020
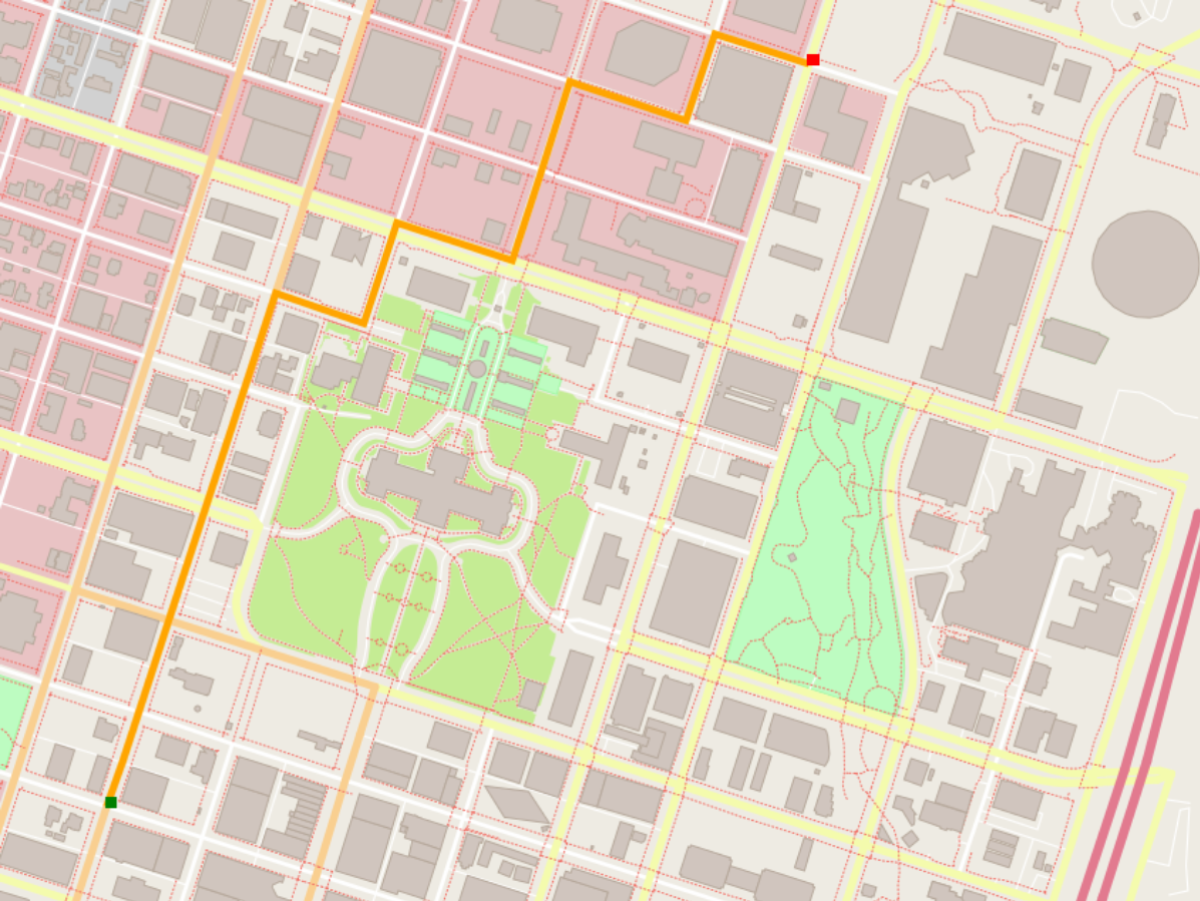
Tools: OSM, C++
- Constructed a Route Planner based on A* algorithm on the OpenStreetMap framework.
- Developed the project using the IO2D library with C++14 on linux based system
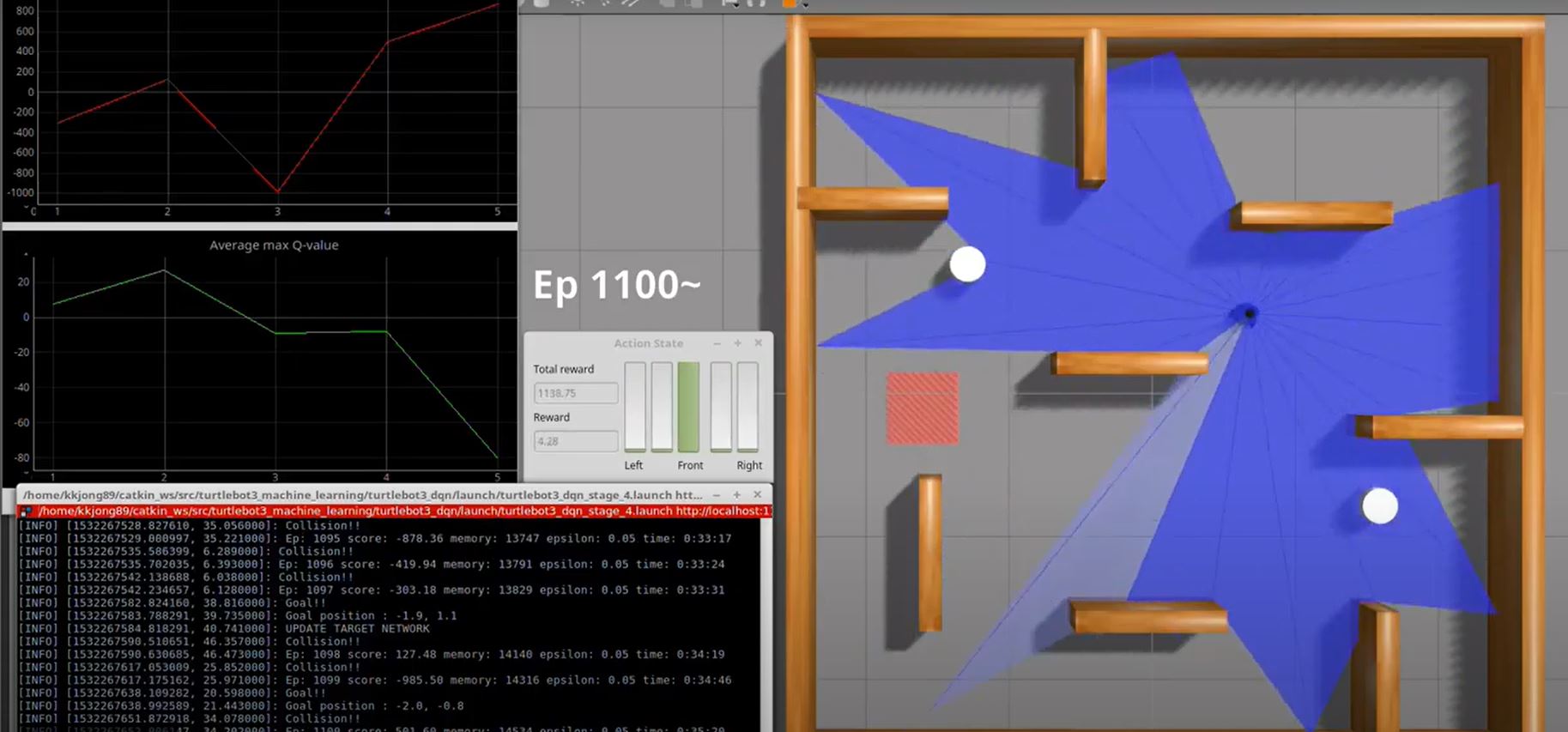
DEC 2020 - JAN 2021
Tools: Python, PyTorch, CUDA
- Performed navigation of TurtleBot using Deep Reinforcment Learning method to reach the goal without hitting obstacles.
- Sucessfully trained DQN with sucess rate of 75%.
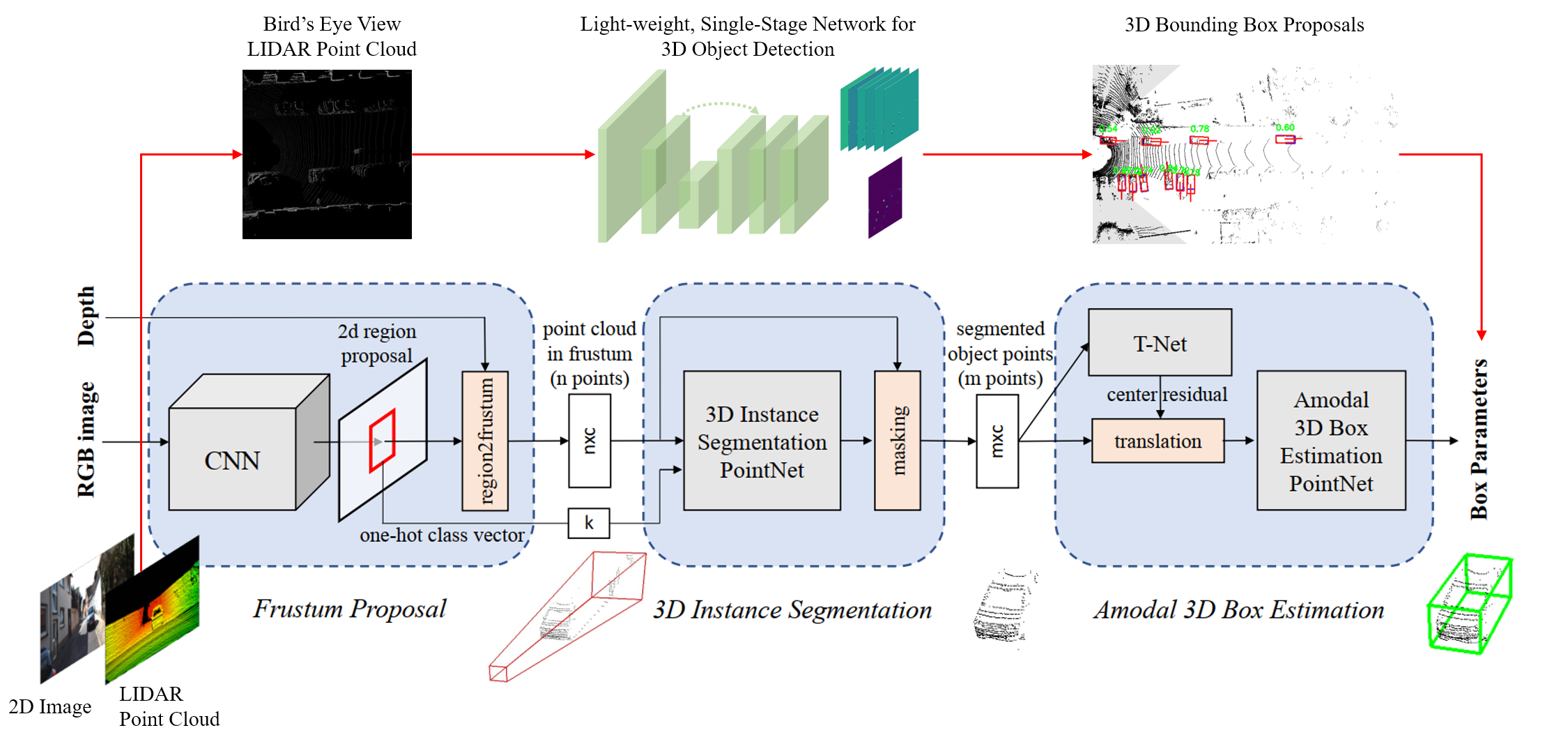
March 2020 - May 2020
Tools: Python, Tensorflow, GCP console
- Performed 3D object detection on the KITTI dataset with the goal of reduced computation time and accuracy
- Experimented with using SqueezeDet in Frustum PointNet architecture for 2D detection instead of fine-tuned Fast R-CNN
Oct 2019 - Dec 2019
Tools: OpenCV, Python
- Extracted image features using SIFT & SURF, Hough transforms, Top-hat filter algorithms compared statistically with YOLOv3
- Integrated Darknet YOLOv3 Deep Neural Network for robust real time object detection and SVM for status recognition
- Built an HSV Classifier for real-time classification of Traffic Lights for Autonomous Vehicles
June 2020 - July 2020
Tools: C++, Linux
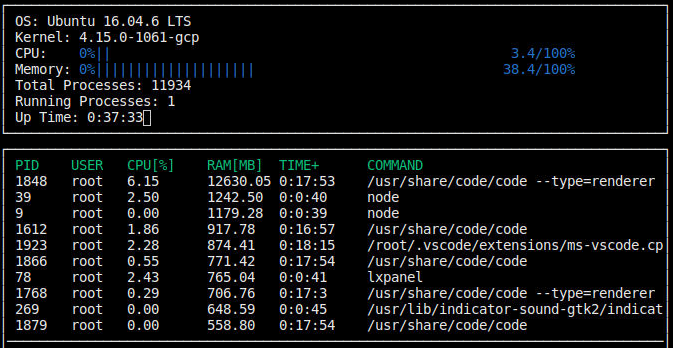
- Implemented a system monitor to track the cpu utilization, ram usage, activity time and base-command.
- Compatible with all Ubuntu Distributions, tested on Ubuntu 16.04 and Ubuntu 18.04
- Based on Object Oriented Programming using C++14

May 2017 - June 2017
- Educated and exposed on the working mechanism of Section 3 of surface-to-air Akash missile and Brahmos missile, Electro-Optical Director, Stabilized Electro-Optical Sight and wash timers

June 2017 - July 2017
- Exposed to work mechanisms of pressure sensors used in power window system along with integrated circuits of radars and industrial electronics
{kind=link}
December 2018
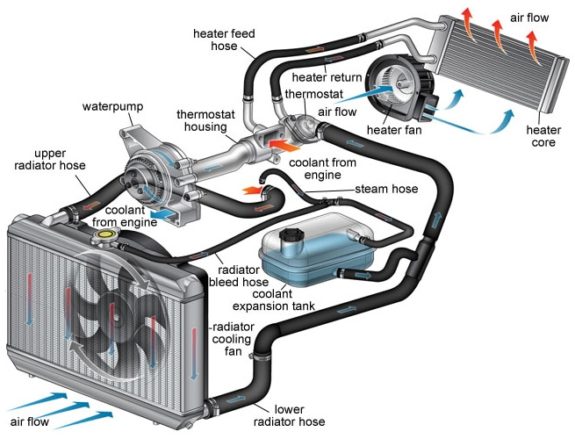
- Published at International Journal of Mechanical Engineering & Technology, ISSN Online: 0976 – 6359, Vol.9, Issue 12, December 2018
- The paper presents various methods to improve automobile radiators efficiency and testing methods to validate the performance of radiators
May 2019
- To study BCI methods and develop a real-time integrated system that connects brain waves to prosthetic arm enabling severe motor impairment patient to play musical instruments using prosthesis
{kind=link}

9-11 March 2018
- Competed at Lockheed Martin Aeronautics Co. Lakeland, as Vice-Captain of Team: Aero-VIT -- Regular Class: Aero-design competition
- Design of 144 inches wingspan aircraft, 18lbs payload capacity for carrying 24 passengers (Tennis balls).
- Implemented algorithm for prediction of lift and drag using Simulink along with Structural and fluent analysis of aircraft using Ansys
- Establishing successful test flight along with participation in competition securing second position in Asian-pacific region.

11-13 July 2018
- Competed at Anna University, as Vice-Captain of Team: Flying Inc. -- Micro Class: Aero-design competition
- Design and Analysis of 36 inches wingspan radio-controlled aircraft with successful flight test and participation in competition

January 2019
- The course focuses on main planning tasks in autonomous driving, including mission planning, behavior planning and local planning.
- Implemented hierarchical motion planner to navigate through a sequence of scenarios in the CARLA simulator: Avoiding static vehicles, following a lead vehicle and safely navigating an intersection.
- Calculated time to collision(static), computed velocity profiles, designed state machine that transitions between lane following, deceleration to the stop sign for safe navigation.
- Generated occupancy grid using lidar scanner measurements, iteratively constructed a probabilistic occupancy grid from log odds updates.
January 2019
- The course Control of Mobile Robots focuses on the application of modern control theory to the problem of making robots move around in safe and effective ways
- As part of course I have wroked on implementation of project strutctre in Simulink for calculating angular speed of left and right wheel with odometry and wheel encoders, PID regulator.
February 2019
- Got broad idea of Machine Learning Algorithms, Unsupervised and Supervised learning, bias/variance theory, SVM's and numerous case studies and applications of learning algorithms to build smart robots (perception, control), Computer Vision and other areas.
Phone
+1-(508)-374-3112
vinukondanagarjun4@gmail.com